This is a project I created during grad school showcasing how to build video game terrains using only layered noise. This project was completed using the Unity game engine and scripted in C#.
Perlin Noise
Random Perlin noise can be generated with different parameters as the starting point for a terrain. Adjusting the size of the noise, the tiling scale, and the clipping rules can create interesting patterns like the following.
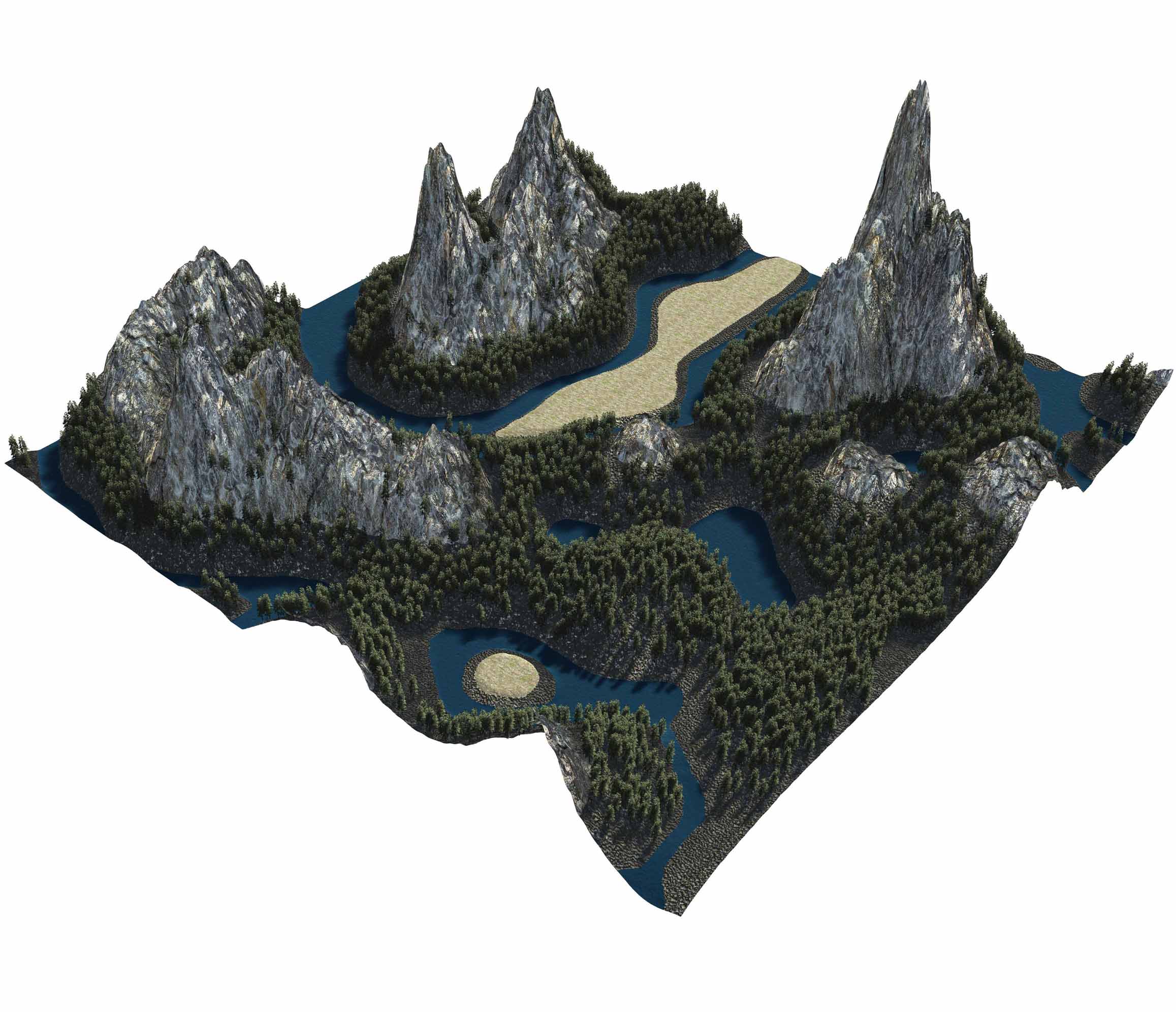
The color value of these resulting images can be used to create rules for terrains. For example, the more black a pixel value were could correspond to an extruded mountain peak or a deep ravine. Layering these rules on top of each other can create even more interesting content, like small craters in a lunar landscape. Additionally, creating video game terrain using these techniques can dramatically reduce game development costs by streamlining world creation. And with a procedurally-generated map, a game isn’t limited to hard borders as new terrain can be generated as the character moves to new game tiles.
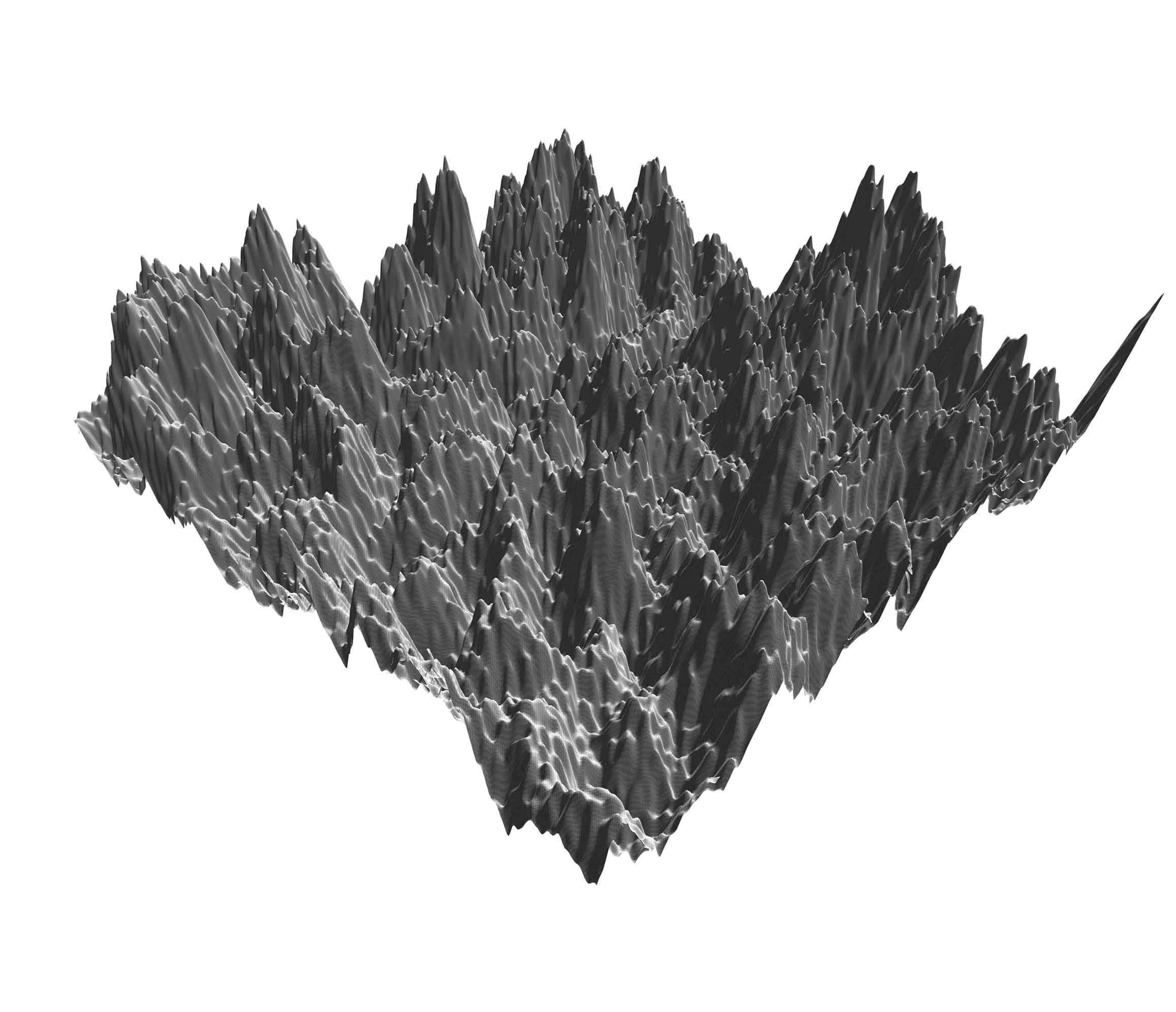
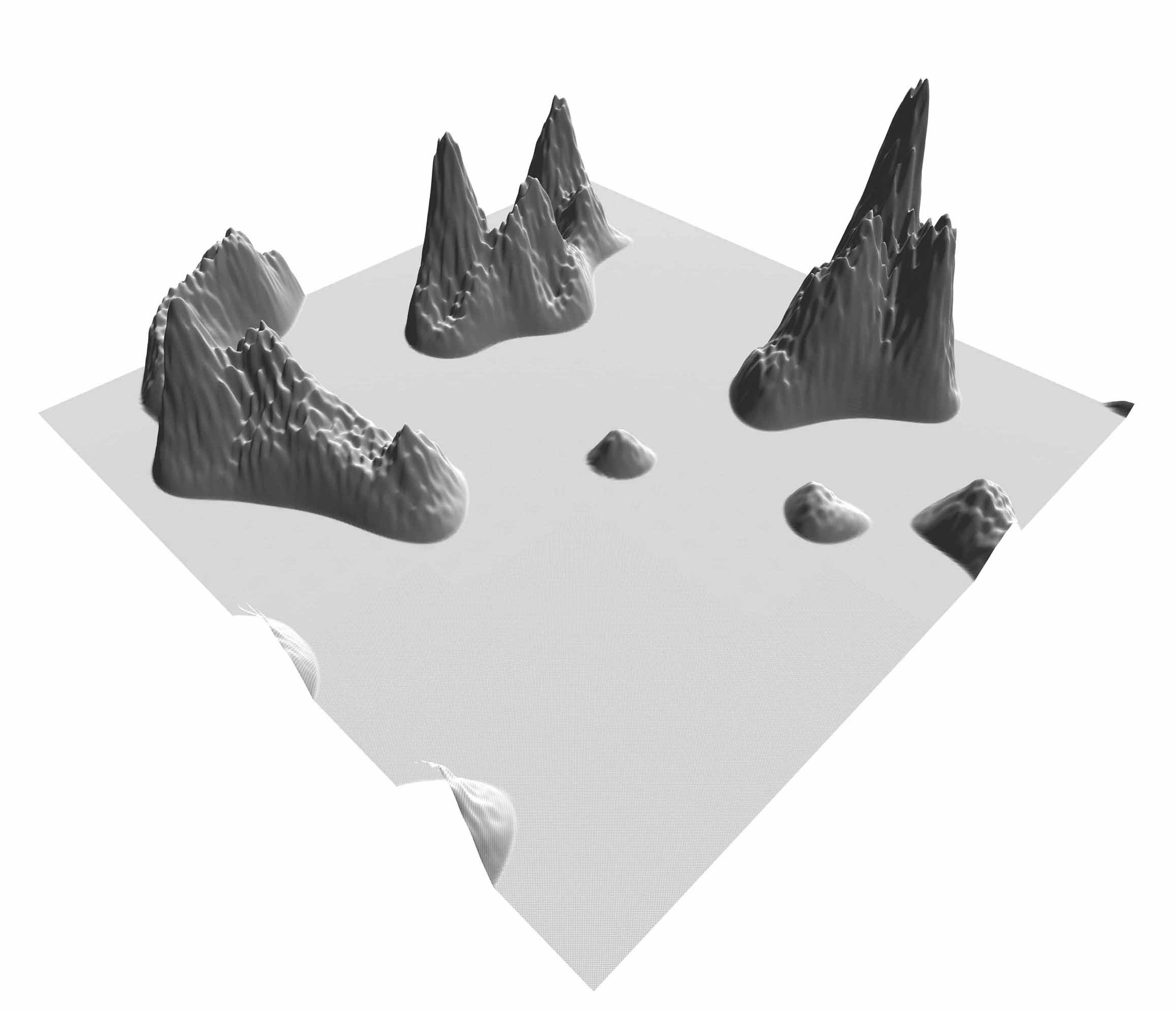
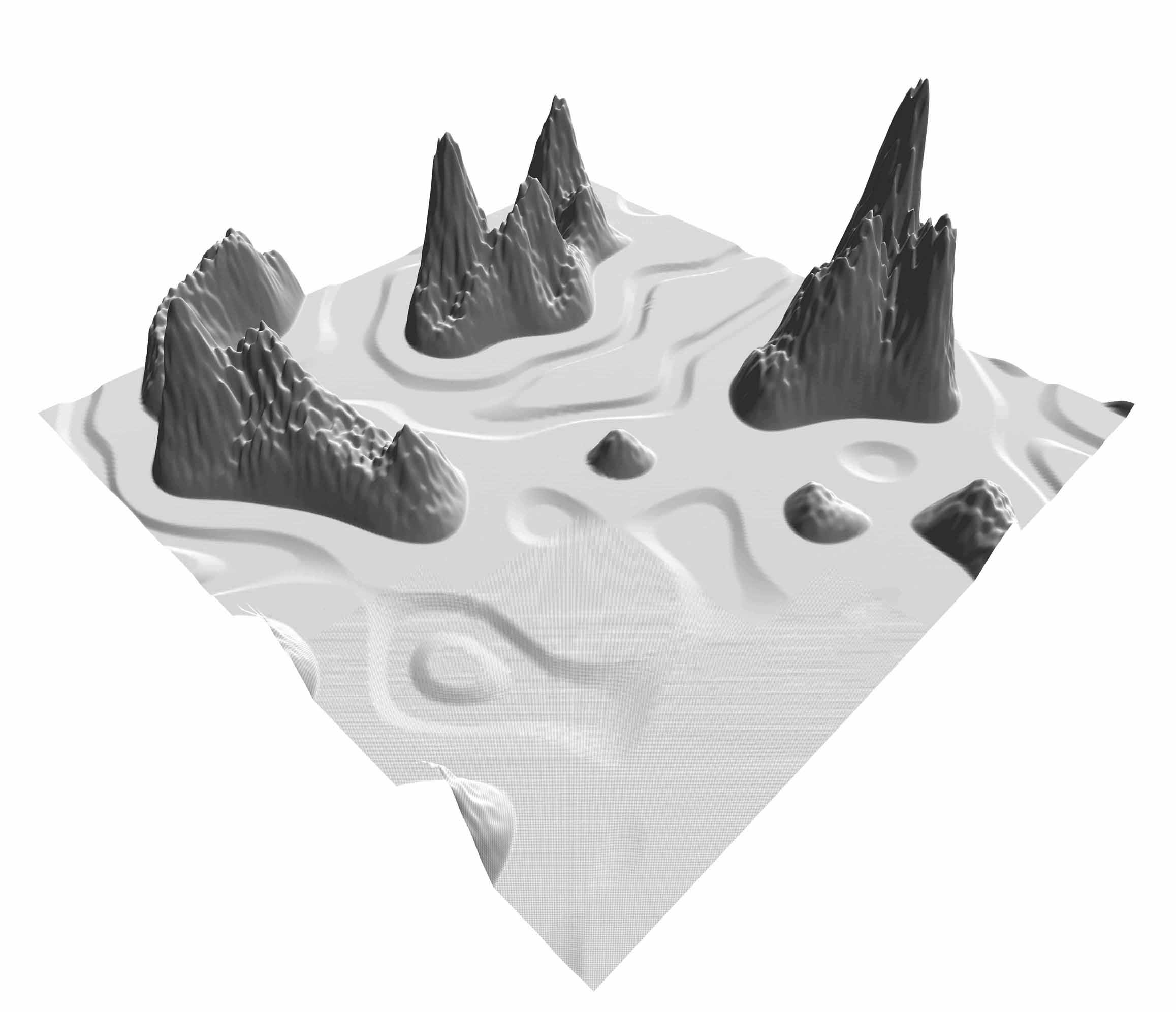
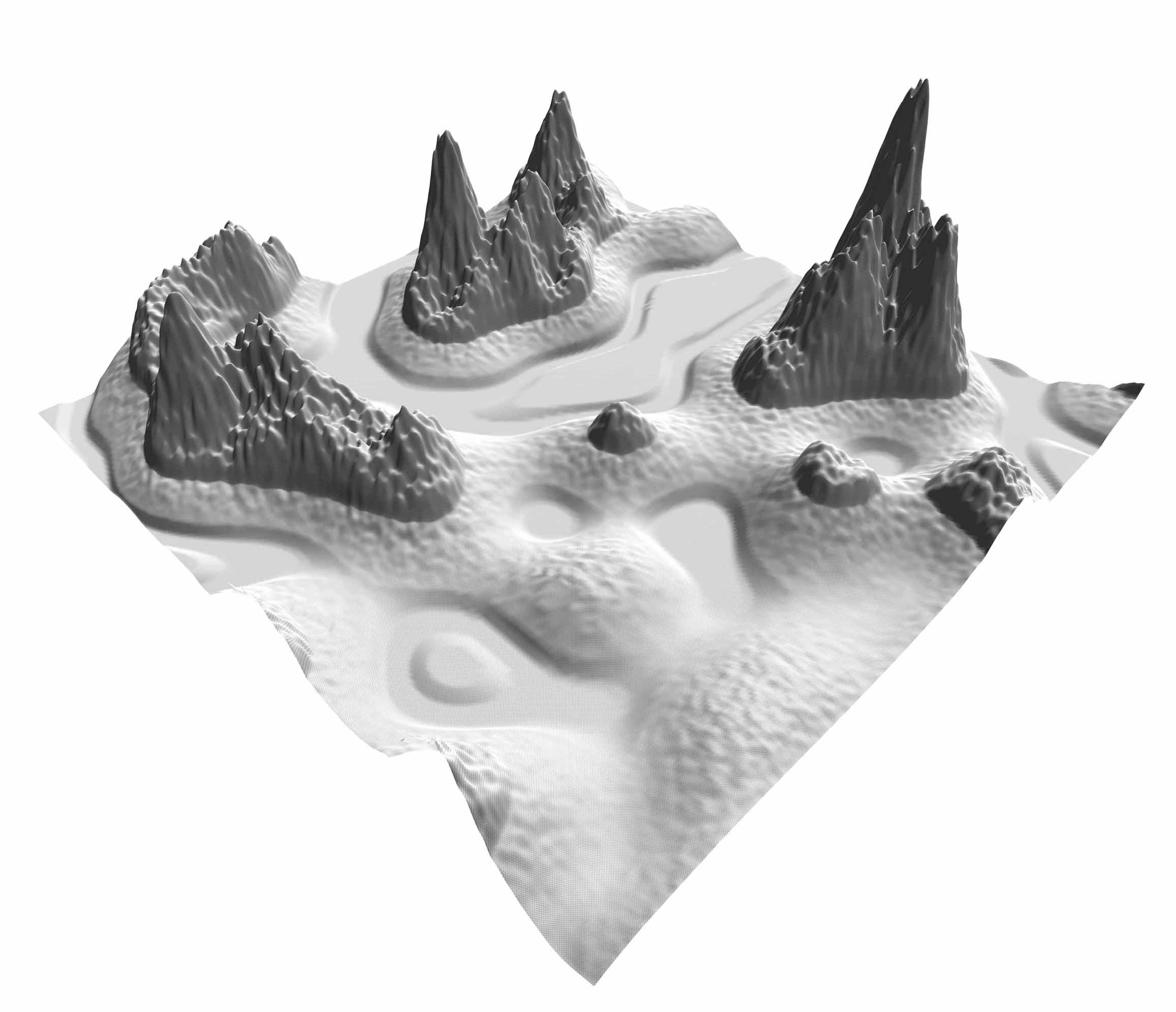
Example of random noise being used to extrude a terrain in Unity.
Layering